Saed News: Boston Dynamics has shown in a new video how its humanoid robot Atlas has learned to lift and carry heavy industrial objects using reinforcement learning and large-scale simulation-based training.
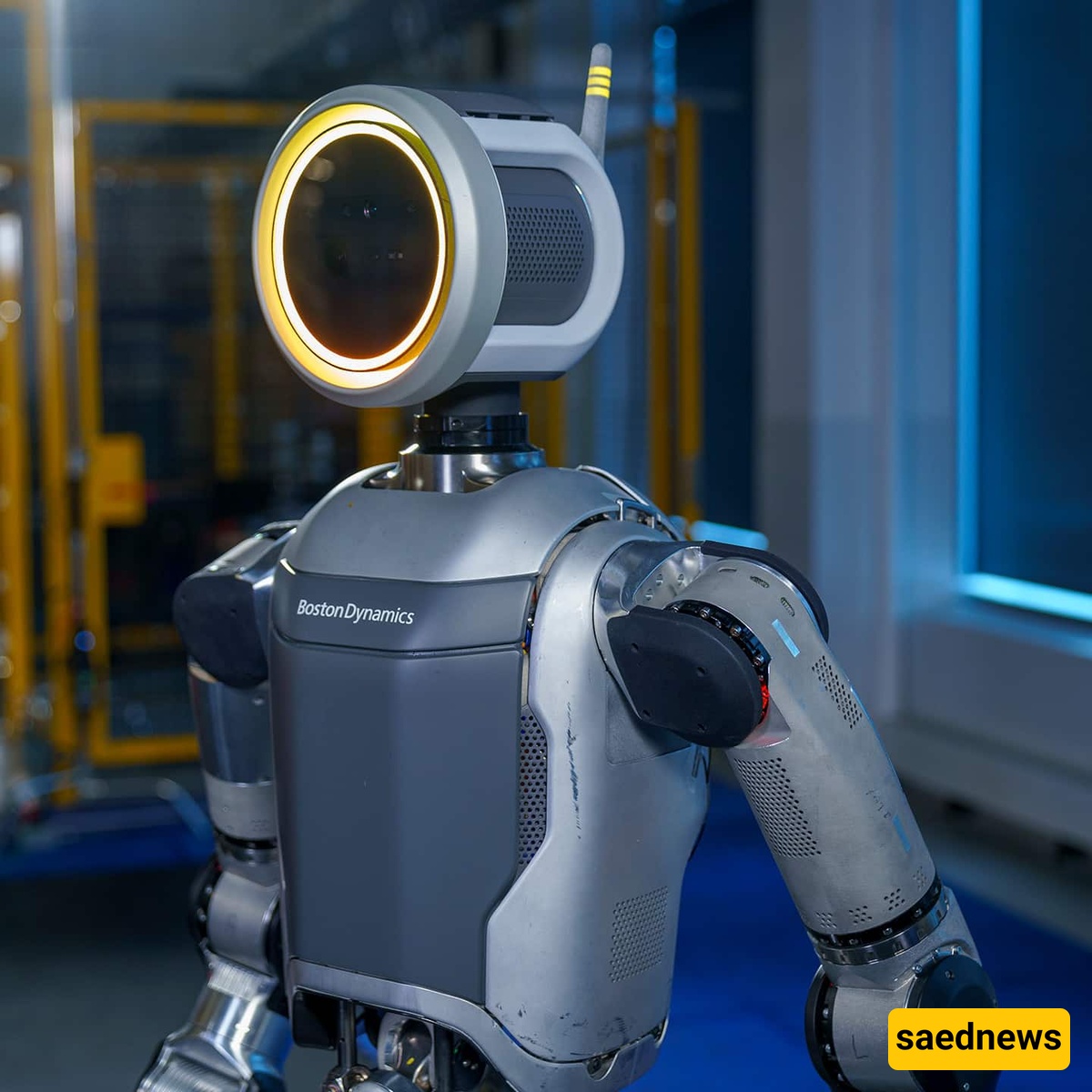
According to SAEDNEWS, citing Interesting Engineering, the company demonstrated in a new technical blog post that the Atlas robot rotates its chest section by 180 degrees and bends down to pick up a small refrigerator, carries it, and simultaneously adjusts for the changing weight inside the object.
This new demonstration of robotic skills represents a shift away from pre-programmed robot movements toward the development of more adaptable industrial behaviors for factories, warehouses, and construction sites. Boston Dynamics has stated that it is developing Atlas as a general-purpose tool for physical tasks.
The robot, instead of relying on cameras, uses “proprioception” or internal body awareness to sense weight, maintain balance, and resist forces while moving objects. This method allows Atlas to truly adapt to unstable loads and changing conditions.
Boston Dynamics trains Atlas using reinforcement learning, while the robot repeatedly practices lifting tasks in simulations under different conditions. The company varied factors such as object weight, ground friction, gripper strength, and refrigerator position to force the robot to adapt.
The company wrote in a post that Atlas practiced movements for millions of hours in parallel simulations on GPU systems.
The process begins with a reference trajectory, which may be an animated motion or a teleoperated demonstration. The robot is then rewarded for correctly performing tasks such as maintaining grip strength and balance during external disturbances.
The company claims one of the advantages of the new Atlas platform is reducing the “sim-to-real gap,” a long-standing challenge in robotics where behaviors learned in simulation fail in the real world due to unpredictable variables such as friction, latency, or sensor noise.